台达10MC运动控制器在双面绑线机上的应用
Delta 10MC Motion Controller Applied in Double Side Lacing machine
摘要:本文介绍了台达10MC总线运动控制器,配合A2伺服控制器,在双面绑线机上的应用;并简述了开发过程。
关键词:台达10MC总线运动控制器 A2伺服 双面绑线机
Abstract:This article introduced Delta 10MC Motion controller applied in Double side lacing machines with A2 servo ,
and its development process.
Keywords: Delta 10MC A2 Servo Double side lacing machines
引言:双面绑线机是电机制造的关键电工设备,主要用于感应电机、电动工具、空调等家用电器电机定子线圈的绑扎。原先采用机械凸轮控制,结构复杂,参数调整困难,运行时振动和噪声较大,设备易磨损。现代改用电子凸轮控制。台达10MC控制器是具有电子凸轮控制功能的新一代运动控制器,能够通过CANopen总线控制多达16台伺服,其内置PLC功能齐全,I/O扩展灵活方便。10MC应用于双绑机控制,能很好地满足设备快速响应的运动控制性能要求,电气控制系统整体性价比很高,操作简便,安全可靠,竞争优势明显。
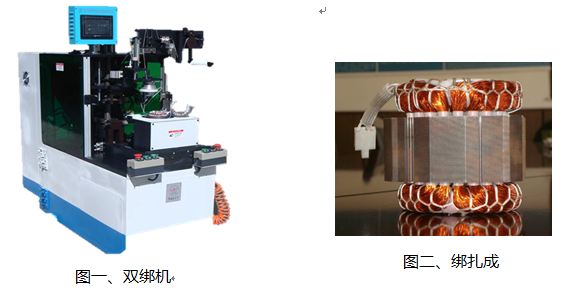
一、 双面绑线机介绍:
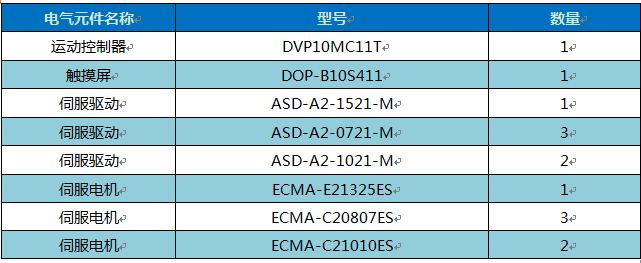
双绑机用于绑扎电机定子线圈,主要动作有定子铁芯分度,针杆进退、上下和角度控制,自动剪切线等,设有绑线张力调节器,可调节绑线的松紧。整机如图一所示,绑扎效果如图二。
 二、 电气控制系统配置:
二、 电气控制系统配置:
1.主要电气控制部件清单:
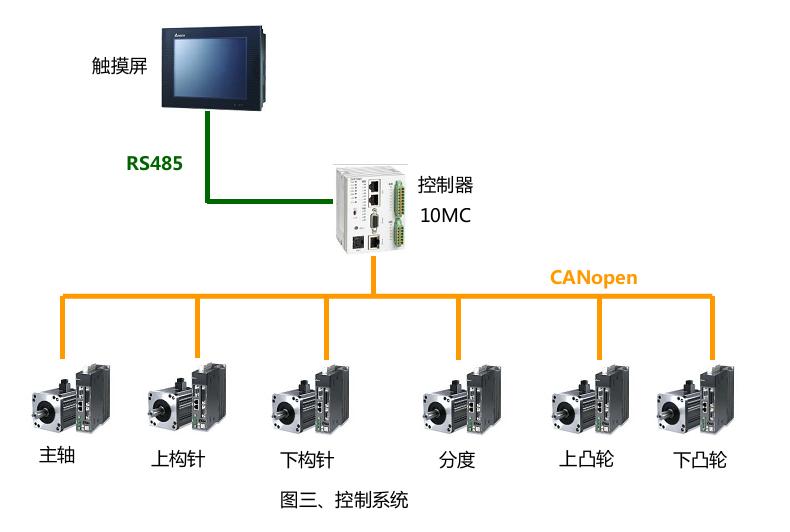
2.控制结构
10MC运动控制器的COM2口与DVP-B10S411触摸屏通过RS485通讯,通过触摸屏可以设置用户工艺参数;控制器的CAN端口与A2伺服进行CANopen通讯,通过CAN总线控制伺服的运动、读取伺服的状态。
 三、 双面绑线机控制要求:
三、 双面绑线机控制要求:
1. 分度控制:
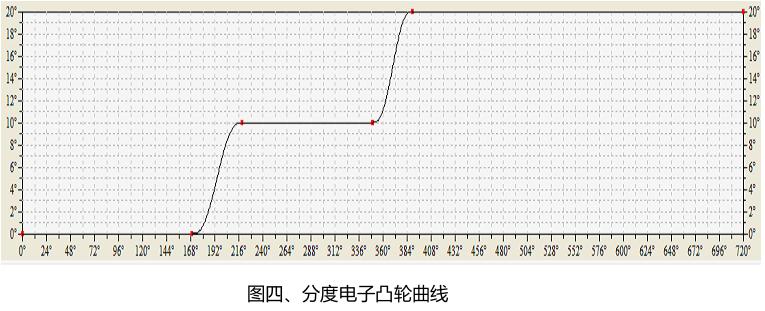
在正常绑线时,如果定子当前槽位中的绑线针数已达到设定的针数时,需要切换到指定槽位进行绑线, 这个动作就是定子分度。
设备通过分度伺服跟随主轴执行预先设定的电子凸轮数据,从而达到对定子的分度控制。分度电子凸轮曲线如图四所示。
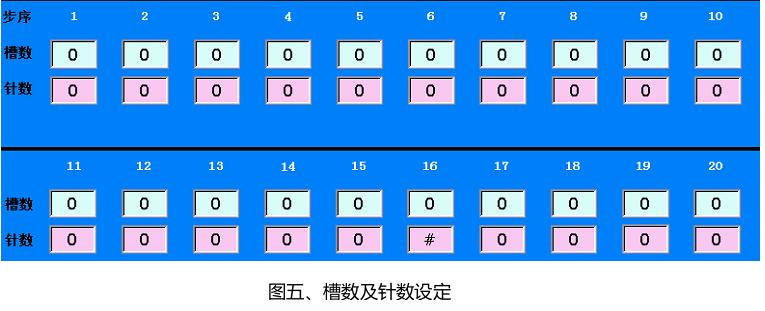
用户可以通过HMI一键生成“逐槽绑”数据,也可以自行设定绑扎槽位顺序,自定义每一槽针数,还可以设定定子分度方向,从而实现逐槽绑、花式绑、正绑、反绑。设定界面如图五所示。
2. 针杆上下和角度控制:
10MC总线运动控制器控制主轴运行,主轴带动机械凸轮控制钩针的前后运动,同时主轴又作为钩针、上下电子凸轮的主轴信号,控制钩针伺服、上下凸轮伺服根据预设的凸轮数据运动。
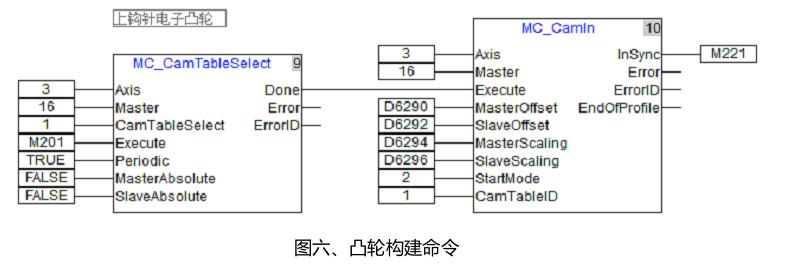
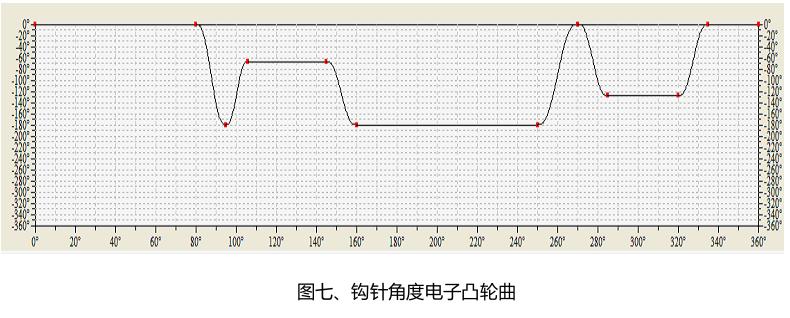
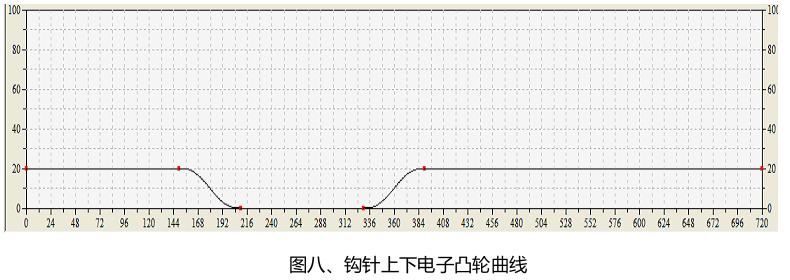
首先构建好凸轮曲线,使用“MC_CamTableSelect”指令选择对应的凸轮曲线;再通过“MC_Camin”指令使得主轴与从轴按照选定的凸轮曲线啮合(如图六所示)。构建完成的钩针角度电子凸轮曲线如图七所示,构建完成的钩针上下电子凸轮曲线如图八所示,
3.在线修改凸轮曲线
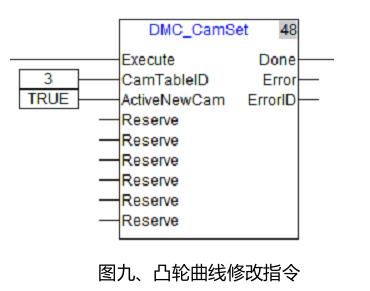
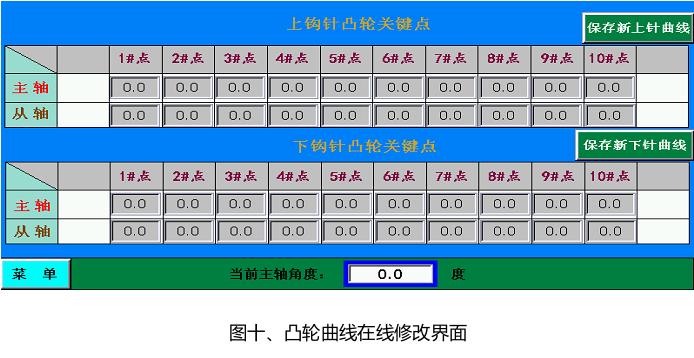
在实际使用中,因客户产品的多样性,不同的马达定子,客户需要随时修改电子凸轮曲线,通过10MC运动控制器的“DMC_CamSet”指令可以在线实时修改电子凸轮曲线,提高了设备的通用性。凸轮曲线修改指令如图九所示,在线修改凸轮曲线界面如图十所示。
 四、 程序结构:
四、 程序结构:
设备程序结构如图十一所示。
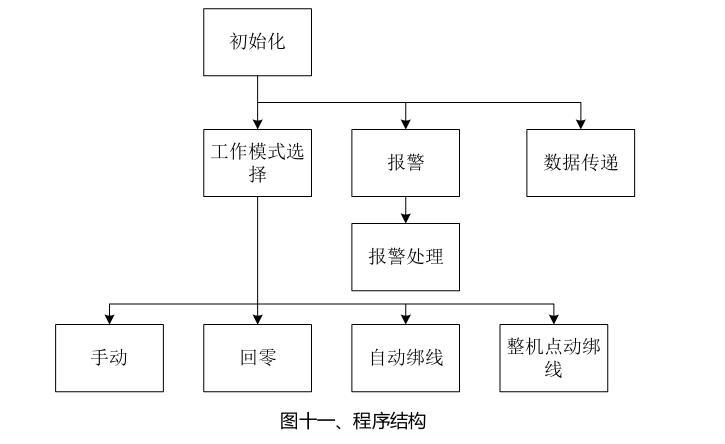
初始化程序负责在控制器送电开机后,对运动控制器的通讯端口、I/0端口以及程序进行初始化操作;然后起动后台报警程序,用于监控机器的故障状态,当设备发故障后,根据故障的等级,令设备执行急停、暂停、警告等相对应的处理;然后进入回零模式,找到各轴的零位,并令各轴进入工作起始位置;只有等回零模式完成以后,设备才能进入自动工作模式;最后程序根据客户选择的工作模式,在得到起动命令以后,正式开始运行。一台定子绑扎完毕以后,定子被自动送出,这时程序回到前面状态,等待新的起点命令。如此周而复始。
运行中如接收到急停命令,各轴立即停止运行。这时用户在屏上可以选择三种后续动作:
1. 继续运行,完成前面被中断的工作;
2. 放弃加工,返回工作起始点;
3. 进入手动模式,各轴手动电动操作。
结束语:
经过长时间、大批量现场实际使用的考验,证明使用10MC运动控制器的双面绑线机工作相当稳定,绑线速度也比以前有所提高,大大提高了综合生产效率。其良好的用户操作界面,得到操作人员的好评。
对于设备制造和维护人员而言,10MC运动控制器的CANopen通讯总线简少了大量电气控制柜的接线、查线工作量;其方便友好的编程环境,也使客户能够很快掌握整个系统,减轻了后续调整、维护的工作量。
参考文献
[1] 台达A2伺服技术手册. DELTA_ASAD_A2_M_EN_20130415 . Delta
[2] DVP10MC运动控制器系统手册. PLC14A201209. Delta
声明:
本文版权为上海津信变频器有限公司所有,如需转载请注明出处。
获取更多帮助和支持,请登陆上海津信变频器有限公司网站 www.sinodrive.com 或拨打上海津信变频器专业服务中心7/24技术支持热线400-888-6560,随时与我们联系。



